手持式激光扫描仪
联系电话:4008-793-880
邮箱:414622048@qq.com

手持式激光扫描仪
作者:admin 时间:2021-08-16 10:42:01
一、产品描述
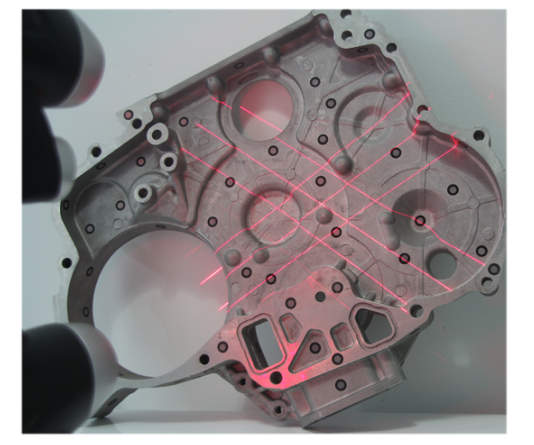
1、 手持式激光三维扫描仪,采用多条线束激光来获取物体表面的三维点云。工程师可以手持仪器并灵活移动操作,通过视觉标记来确定扫描仪在扫描过程中的空间位置,从而完成物体表面的三维点云整体重构。扫描仪可以方便携带到工业现场或者生产车间,并根据被扫描物体的大小和形状进行高效精确的扫描,使用操作过程灵活方便,适用各种复杂的应用场景。
2、工作原理
1.仪器上的两组相机可以分别获得投影到被扫描对象上的激光,该激光随对象 形状发生变形,由于这两组相机事先经过准确标定,就可以通过计算获得激 光线所投影的线状三维信息。2.仪器根据固定在被检测物体表面的视觉标记点来确定扫描仪在扫描过程中的空间位置,这些空间位置被用于空间位置转换。3. 利用第1步获得的线状三维信息和第 2 步的扫描仪空间相对位置,当扫描仪 移动时,不断获取激光所经过位置的三维信息,从而形成连续的三维数据。
3、产品特点
便携高效,工作时操作人员手持设备,可以随时变化角度和距离对被测物体 进行快速扫描;仪器重量小于一公斤,放入安全防水箱后总重小于六公斤,轻松携带至任何场合;目标点自动定位,不需要额外机械臂或其他跟踪设备,被扫描物体可以移动,无需固定;扫描数据实时呈现,真正实现“所见即所得”;能扫描各种大小和形状的物体,小到鸡蛋,大如飞机,都可轻松应对;采用千兆网线连接,能支持远距离正常工作;两个高分辨率的图像采集单元及一套激光发射器,扫描更清晰精确;点云无分层,自动生成三维实体图形(三角网格面); 可内、外扫描,也可在狭窄的空间扫描,如飞机驾驶舱,汽车内部仪表板等无局限。同时可多台扫描设备同时工作扫描,所有的数据都在同一个坐标系中,无需后期拼接;可通过点云密度选择来控制扫描文件的大小,根据细节需求,组合扫描不同的部位;外部环境对扫描精度影响小,即使是阳光直射也能正常工作;从汽车车漆镜面到黑色物体表面都能轻松应对,绝大部分情况下都不需要喷显像增强剂。
光源形式:3组交叉激光外加1条额外激光共计7条激光
单束激光:可切换成单条激光扫描模式,适用于扫描深孔及死角
扫描快速:扫描速度快,每秒26.5W次测量
测量精准:扫描精度高,最高可达0.030mm,分辨率可达0.050mm
声光报警:独有的声光报警系统让设备使用更加得心应手
轻巧灵活:得益于小巧的尺寸,可在狭小空间内轻松使用。设备整体重量不足1kg
传输稳定:千兆网传输数据,传输速度可达1Gbps,快速稳定
校准方便:用户可以按照所需的频率对扫描仪进行校准。校准只需花费1分钟左右的时间,而且它可以确保最佳工作状态。
稳定可靠:所有工作条件或环境下都可实现持续稳定且可重复的结果。
动态参考:使用光学反射靶来形成锁定至部件自身的参考系统,使用户可以在扫描期间按自己需要的方式移动物体,且周围环境的变化丝毫不会影响数据采集质量和精度。
可自定位: 三维扫描仪既是一个数据采集系统,也是其自身的定位系统,因此无需配备外部跟踪或定位设备。
轻便易携:只需携带一个防水箱和一台笔记本即可外出工作
航空插头:将所有连接线整合到航空插口中,保证连接和传输的可靠稳定。
二、配置清单
|
序号 |
名 称 |
规格型号 |
生产品牌 |
单位 |
数量 |
备注 |
|
1 |
手持式三维扫描仪-主机 |
JLAN 6D |
蛟龙 |
台 |
1 |
|
|
2 |
信号电源线 |
5米 |
蛟龙 |
根 |
1 |
|
|
3 |
安全防水箱 |
|
蛟龙 |
个 |
1 |
|
|
4 |
快速标定板 |
|
蛟龙 |
块 |
1 |
|
|
5 |
三维扫描软件 |
|
蛟龙 |
套 |
1 |
|
|
6 |
反光标记点 |
|
蛟龙 |
颗 |
2000 |
|
|
7 |
移动图形工作站 |
具体配置如下: CPU: I7-6820HQ 内存:32GB 2133MhzDDR4 线卡:NVIDIA Quadro M1000M 2G 网口接口:千兆网网口 |
美国DELL |
台 |
1 |
|
三、技术参数表
|
序号 |
项目 |
技术指标 |
备注 |
|
1 |
型号 |
JLAN 6D |
|
|
2 |
重量 |
0.95 kg |
|
|
3 |
尺寸 |
315*165*105mm |
|
|
4 |
光源形式 |
三束交叉线激光加一束单独工作的额外激光,共计七束激光 |
|
|
5 |
扫描速率 |
265000次测量/秒 |
|
|
6 |
激光类别 |
II级(人眼安全)) |
|
|
7 |
分辨率 |
0.05mm |
|
|
8 |
精度 |
最高0.03mm |
|
|
9 |
体积精度1 (单独使用扫描仪) |
0.02mm+0.08mm/m |
|
|
10 |
体积精度2 (配合全局摄影测量系统) |
0.02mm+0.025mm/m |
|
|
11 |
基准距 |
300mm |
|
四、行业应用
1.质量检测
通过三维扫描技术可以获得扫描物体的外形三维数据,将获得的三维扫描数据和原始的三维图纸进行3D比较分析,可以轻松获得各个位置的偏差值,为大曲面,复杂结构的尺寸检测提供友好的解决方案。除此以外,还可以通过三维数据的拟合轻松获得诸如同轴度,孔距孔径,装配间隙等数据,在三维数据中提取和获得二维尺寸。
模拟装配
通过对装配件的扫描获得其三维数据,通过专业的三维软件便可以实现装配件的模拟装配,轻松快速地获得装配结果及分析。当模拟装配无法成功时还可以为装配件的后期改良提供依据。
3.运动状态分析
通过对开闭合件不同状态下的三维扫描,可以获得开闭合件在不同运动状态下的结构关系,可以为结构分析,尺寸设计等提供准确的数据。
4.逆向工程
通过对对象的三维扫描,可以轻松获得扫描对象的三维数据。将三维数据导入三维造型软件中便可为造型设计提供依据,节省了人工测绘的时间,不仅提高了效率也因其良好的精度使得逆向造型更为精确。
5.尺寸检测
尺寸检测是所有产品质量检测过程中的必经环节,尤其在精密零部件产出过程中,难以避免生成制造过程中出现变形导致精密零部件产生不良品质。随着制造水平的提高,在家电、飞机、汽车零部件中出现了大量的A级曲面。用户对曲面零件的精度要求也越来越高,但由于曲面零件形状复杂,传统的检测工具存在检验难度大、精准度不高、检测时间长、操作难度大等硬伤。现代制造行业所使用的材料广泛,常用到一些易变形的材料,接触式测量检测方式无法操作,手持式激光三维扫描仪就成了很好的替代性检测工具。
系列手持式三维扫描仪对一些精密零部件的质量检测起到重要作用,通过三维扫描获取产品的三维点云数据,配合专业的三维检测软件,对产品的外形进行快速的三维检测,形成精确的CAV全尺寸检测报告,帮客户分析出点、线、面的各项偏差,实现品质检测,大大降低检测成本的支出,加快交期,大大的提升公司的整体竞争力。
五、软件功能 Ø
软件功能主要分为“三维扫描”和“数据处理”两个主要模块,“三维扫描” 功能模块对应三维数据采集及过程中的参数设置;“数据处理”功能模块对 应数据采集完成后对相应的点云或者网格面数据进行处理以及参数设置;软件具备新建工程、保存、设置、读取等系列功能,对应的数据格式主要包 括工程格式、标记点格式、点云格式和三角网格面格式;三维数据自动生成 STL 三角网格面,STL 格式可快速处理数据;扫描软件可以直接对扫描所获得的点云数据进行点云选取、删除、去除体外 孤立点和非连接项、平滑滤波和特征拼接等一系列功能; 软件具备实时设置扫描点间距、实时调整激光强度、变化和调整扫描视角等功能;软件界面具有点云间距选择功能,用户可根据被扫描物体体积及细节度等要 求选择点云间距,该点云间距与通用第三方软件匹配一致。
六、培训及售后
培训 在用户购买我公司的产品后,我公司将对用户进行设备的使用、 校准、日常保养等方面进行培训,直至买方操作人员完全掌握操作技术为止。用户可以选择到我公司进行完善系统的设备使用培训,或者也可以选择由我公司安排技术员到现场进行技术培训。此外,在设备交付后,买方相关操作人员如遇技术问题,我公司会随时提供技术支持。
售后 我公司对售出的该系列手持式激光三维扫描仪实行一年质保。无论是否处于保修期,
- 上一条:没有了!
- 下一条:没有了!